2023年11月17日晚19:00,CSU国巍教授课题组2023年11月份组会于红3楼二楼会议室召开。此次会议主要由硕士生史策、郭志恒汇报自己近期的工作进展以及下一阶段的工作。汇报结束后,组内其他成员分别就汇报内容进行了热烈的讨论。
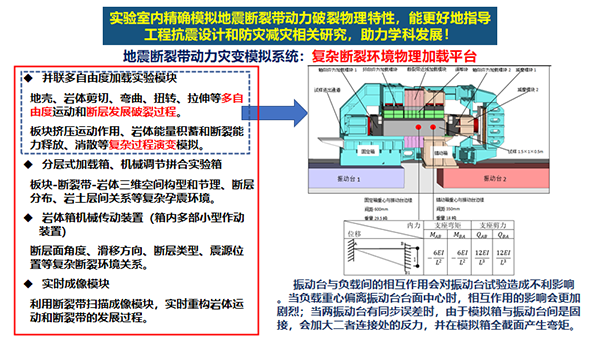
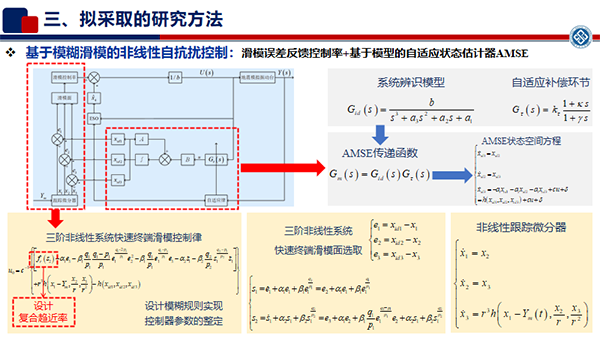
硕士生史策的报告题目为《基于滑模自抗扰控制的地震模拟振动台力控策略研究》,汇报主要内容:岩样断裂错动模拟箱整体放置在双台阵振动台试验系统上部,其中固定箱重量为29.5吨,重心与振动台边缘距离600mm;错动箱重量为18吨,重心与振动台边缘距离350mm。振动台与负载间的相互作用会对振动台试验造成不利影响,使得振动台的控制性能降低,负载的响应出现偏差等。首先,当负载重心偏离振动台台面中心时,相互作用的影响会更加剧烈;其次,当两振动台有同步误差时,由于模拟箱与振动台间是固接,可以类比为支座沉降作用在两端固接的超静定结构中产生的内力,会加大二者连接处的反力,并在模拟箱全截面产生弯矩,易对试件造成破环,并会严重影响振动台的控制性能。为了解决上述两个问题,首先需要开发一套抗干扰能力强的振动台控制算法,并在此基础上,实现对振动台与试件之间作用力的精确控制。
硕士生郭志恒的报告题目为《基于无人机视觉的灾后轨道不平顺研究》,高速铁路作为我国在世界上的一张“亮丽名片”,我国属于地震多发的国家。传统轨道损伤在灾后检测手段渐渐无法满足时间需求,因此,研发智能、高精度的灾后轨道系统损伤检测技术对评估轨道安全性以及后续维护和修复轨道具有重要意义。传统的轨道不平顺检测方式人工巡检,近年来也有学者提出在轨检仪上搭建光学设备以进行检测。但面对钢轨断裂,落石等情况,使用轨检仪检测会对人造成危险。本报告主要调研大量以无人机为载体,使用机器视觉手段,测量桥梁、建筑结构的位移的文献,最后得出,基于无人机和计算机视觉测量轨道不平顺具有可行性。
CSU国巍教授课题组每周一次的组会是课题组制度之一,由各组员汇报自己近期的研究工作和未来计划。欢迎感兴趣的同学参加会议并参与讨论。
